What is an Incremental Encoder?
An incremental encoder is a type of encoder device that converts angular motion or position of a shaft into an analog or digital code to identify position or motion. Incremental encoders are one of the most commonly used rotary encoders.

Incremental encoders can be used in positioning and motor speed feedback applications, including servo/light, industrial or heavy-duty applications.
An incremental encoder provides excellent speed and distance feedback and since there are few sensors involved, the systems are both simple and inexpensive. An incremental encoder is limited by only providing change information, so the encoder requires a reference device to calculate motion.
Free White Paper Resources:
❮
Encoder Mounting
Encoder Output
IP Rating
❯
How Does An Incremental Encoder Work?
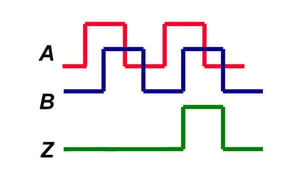
An incremental encoder provides a specified amount of pulses in one rotation of the encoder. The output can be a single line of pulses (an “A” channel) or two lines of pulses (an “A” and “B” channel) that are offset in order to determine rotation. This phasing between the two signals is called quadrature.
Learn more about quadrature encoder output here
In an incremental optical encoder, the typical assembly consists of a spindle assembly, PCB, and cover. The PCB contains a sensor array that creates just two primary signals for the purpose of position and speed. For an incremental optical encoder, an optical sensor detects light as it passes through a marked disc. The disc moves as the spindle assembly rotates and the information is translated into pulses by the PCB. For an incremental magnetic encoder, the optical sensor is replaced with a magnetic sensor and the rotating disc contains a series of magnetic poles.
Optionally, additional signals can be provided:
An index or ‘Z’ channel can be provided as one pulse per revolution signal for homing and pulse count verification on the A and/or B channels. This index can be gated to either A or B in their various states. It can also be un-gated and vary in width.
Commutation (U, V, W) channels can also be provided on some encoders. These signals are aligned to the commutation windings found on servo motors. They also ensure that the drive or amplifier for those motors apply current to each winding in the correct sequence and at the correct level.
Our Most Popular Incremental Rotary Encoders

HS35R Hollowshaft Incremental Encoder
Reliable Hollow-Shaft Encoder Offers Extreme Performance for Heavy Duty Applications
Customize & Buy Now
View Key Product Features
- Up to 5000 PPR
- Optical Sensing
- Up to IP67

HA25 Shafted Incremental Encoder
Size 25 Incremental Shafted Encoder with Extended Temperature Option
Customize & Buy Now
View Key Product Features
- Up to 2540 PPR
- Optical Sensing
- Up to IP66

HS35iQ Encoder with Programmable Output
Programmable Hollow Shaft Incremental Encoder with Specific Fault Detection
Customize & Buy Now
View Key Product Features
- Up to 20,000 PPR
- Optical Sensing
- Up to IP67
Incremental Encoder Uses & Applications
An Incremental Encoder is designed to be versatile and customizable to fit various applications. The three broad categories of applications based on the environment are:
- Heavy Duty: demanding environment with a high probability of contaminants and moisture, higher temperature, shock, and vibration requirements as seen in pulp, paper, steel, and wood mills.
- Industrial Duty: general factory operating environment which requires standard IP ratings, moderate shock, vibration, and temperature specs as seen in food and beverage, textile, and general factory automation plants.
- Light Duty/Servo: controlled environment with high accuracy and temperature requirements such as robotics, electronics, and semiconductors.
 {{else if (myEq content.heading "Absolute Encoders")}}
{{else if (myEq content.heading "Absolute Encoders")}}
 {{/if}}
{{/if}}