Frequently Asked Questions about Incremental Encoders
What is an incremental encoder used for?
An incremental encoder is used to identify speed and direction. Operators use incremental encoders for closed loop speed feedback applications where precise coordination between motion devices is required.
How does an incremental encoder work?
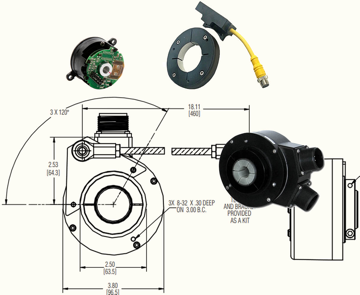
There are optical and magnetic type incremental encoders. Both types consist of a spindle assembly, sensor, and cover. As the spindle assembly rotates, the sensor detects motion and translates mechanical motion into electronic pulses. The pulses can then be processed by a controlling device for the purpose of determining speed, direction and relative position.
Learn more about the technology of incremental encoders here
What is difference between an incremental and absolute encoder?
The major difference between an incremental and absolute encoder is that an incremental encoder only provides relative position data to an index location while an absolute encoder provides unique position data without the need to home. Therefore, absolute encoders work in situations where homing at startup is not an option or where immediate operation after power failure is a priority.