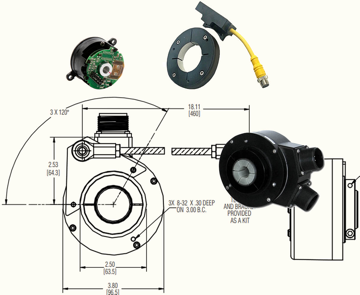
HDP30
30mm diameter non contact encoder, J1939 protocol option, IP68 rating option, 8-512 PPR incremental or absolute output options.
Learn More

Upgrade your systems with our advanced non-contact encoders. Designed to eliminate mechanical wear and tear, non-contact encoders offer superior accuracy, long-lasting durability, and maintenance-free operation. Ideal for a variety of industrial applications, these encoders ensure reliable and efficient performance.